Already a long time ago the idea was born to build a quadcopter completely from scratch.
During the past days i started with the frame construction.
The initial specs i made were
After seeing the following video i decided to stack two frames as well to get more stability.
Frame components
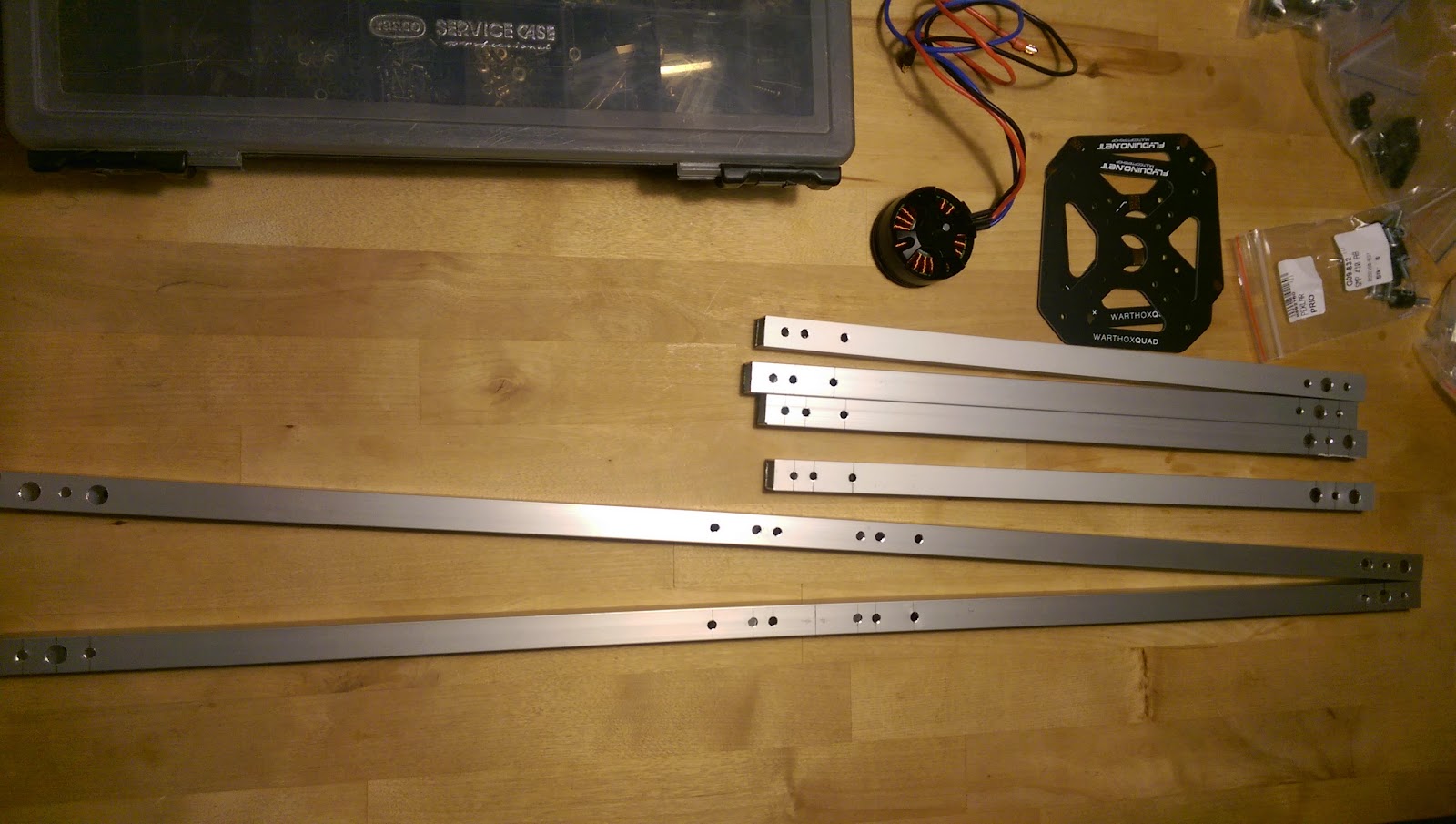





During the past days i started with the frame construction.
The initial specs i made were
- overall weight <5kg
- able to lift ~1kg payload
- >15min flight time
- Frame
- selfmade frame of 15mm Aluminium rod / 70cm frame diameter.
- rubber damper between frame and electronic (M4 screw thread).
- M4 spacers.
- Flyduino HE4108 700KV Brushless Outrunner Motor with ~13" props.
- Dys 40A Multikopter ESC Opto "SimonK" V2.
- 3DR Pixhawk autopilot.
- FrSky Taranis RC.
- depending on the power consumption i will decide on a battery later.
After seeing the following video i decided to stack two frames as well to get more stability.
I hope i could fly one day this way as well. But this will be a long way to go. Especially for me as a weekend only pilot.
Frame components
Keine Kommentare:
Kommentar veröffentlichen